
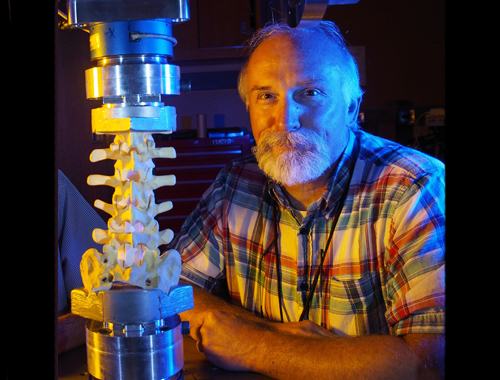
Dr. Denis J. DiAngelo is a Distinguished Professor of Biomechanics and Director of the BioRobotics and Rehabilitation Laboratory in the Department of Orthopaedic Surgery and Biomedical Engineering at the University of Tennessee Health Science Center, as well as Co-Founder and President of medical device company EMBrace Design. He joined UTHSC in 1993 after receiving his master’s degree and Ph.D. in biomechanical engineering from McMaster University in Ontario, Canada.
Dr. DiAngelo’s graduate studies focused on using simulators to study human joint movement to gain an understanding of how joints function with the whole-body system and to design better devices to support joints. He brought this experience with him when he joined UTHSC, and it formed the basis for his early work in the BioRobotics Laboratory. While at UTHSC, Dr. DiAngelo has developed advanced robotic testing platforms that simulate how joints in the body move under different loading conditions. One such platform, a “spine robot,” evaluates the biomechanics of the whole spinal system, including discs, ligaments, and muscles. This robot has opened opportunities for Dr. DiAngelo and his lab to do advanced testing and simulation with the medical device industry.

The spine robot played a crucial role in developing and fabricating a prototype back brace for Dr. DiAngelo’s company, EMBrace Design. The brace, called the START (Spinal Traction and Rehabilitative Therapy) Brace, was developed to help treat lower back pain. Unlike conventional traction braces that are rigid and restrict movement, the START Brace offloads the spine and makes it possible for wearers to exercise a full range of motion, from bending over to twisting side-to-side. Coupled with physical therapy, the START Brace can help patients complete their exercise programs, build strength, and restore their ability to perform everyday activities. Patent applications on the brace were filed by the University of Tennessee Research Foundation (UTRF) in 2017 and led to the establishment of startup EMBrace Design. A prototype START Brace is currently undergoing clinical testing, and a soft launch of the device could happen as soon as Fall 2018.
In addition to the START Brace, Dr. DiAngelo began collaborating with several pediatric orthopedic spine surgeons at LeBonheur Children’s Hospital about five years ago to develop a dynamic back brace for children with scoliosis. Existing braces are typically constraining and make it difficult for children to breathe or move around while wearing them. The goal was to create a dynamic bracing system that enables the wearer to recruit his or her muscles to complete movements that counteract the spine’s deformity and, hopefully, avoid surgery. Dr. DiAngelo first designed a mechanical analog model of a pediatric spine, that when mounted in the spine robot, provided information on the corrective force capability of a conventional scoliosis brace. This led him to design a novel fastening device to secure the brace to the body with a constant force while enabling movement with the brace on. Clinical testing for this scoliosis brace is ongoing, and UTRF has already filed a patent application to protect the initial design.
Dr. DiAngelo has expanded his research beyond the spine over the past eight to ten years to investigate foot, ankle, and shoulder biomechanics. One area of interest involves designing a dynamic ankle brace that allows a patient to move the joint while wearing the brace, helping the ankle heal better and avoid atrophy. Current ankle braces work against the joint’s natural range of movement and can make the injured joint even worse. Dr. DiAngelo’s new brace design offloads weight from the ankle and provides a full range of motion. He has tested the device with healthy volunteers to validate that the brace works as intended. The next phase of testing will involve a clinical trial to treat patients with post-traumatic ankle osteoarthritis.
Dr. DiAngelo points to UTRF as a vital partner in helping him advance his research interests beyond the lab and into the marketplace. He has received two UTRF Maturation Fund grants, one for research and development for an early stage back support device and the other for clinical research for his new ankle brace design. UTRF also provided full support throughout the patent application process and connected Dr. DiAngelo with ZeroTo510, a medical device accelerator in Memphis, Tennessee (EMBrace Design was a member of ZeroTo510’s 2017 cohort).