Improved Flexural Rigidity in Concentric-Tube Robots
The Problem
A challenge with concentric-tube robots (CTRs) is the tradeoff between specific performance and design stability. A larger range of motion and dexterity entails a decrease in stability, which limits the capabilities of the robot in practice. Modifying the structural properties of the tubes to increase stability also comes with other tradeoffs, such as reduced strength. Elastic stability of the tubes is compromised when their curvature overlaps, causing the tubes to "snap" to a different configuration with high velocity, potentially causing patient injury.
The Solution
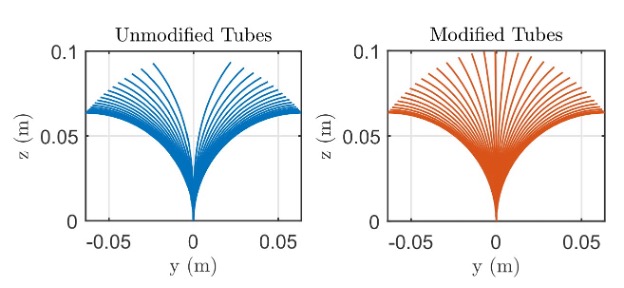
Researchers at the University of Tennessee and Louisiana State University have invented a concentric-tube steerable device which has the improved structural modification of laser cut patterning on the tubes. The nested tubes can then have different flexural rigidity properties. The tubes having asymmetric stiffness properties improves the CTR's arm stability while minimally sacrificing strength. This modification also gives the tubes a wider range of motion, eliminating the unstable region that causes snapping.
Unmodified vs. Modified Input-Output Angle Curve
Benefits
| Benefit |
|---|
| Maintains CTR movement range and bending angle without significant reduction in stiffness |
| Improves CTR stability while preserving strength |
| Reduces likelihood of injury to the patient |
| Prevents "snapping" |
More Information
- Gregory Sechrist
- Technology Manager
- 865-974-1882 | gsechris@tennessee.edu
- UTRF Reference ID: 21152
- Patent Status: 11,964,387 B2
Innovators
Caleb Rucker

Associate Professor and B. Ray Thompson Professor, Department of Mechanical, Aerospace, and Biomedical Engineering, The University of Tennessee, Knoxville; Director, REACH Lab
Dr. Rucker received his PhD from Vanderbilt University in 2011. His research interests include understanding robotic manipulators that have a continuously flexible structure, sensing the mechanical interaction between robots and soft tissue, and exploring novel manipulator structures and actuation methods.
Dr. Rucker received his PhD from Vanderbilt University in 2011. His research interests include understanding ...
Hunter B. Gilbert

Associate Professor, Department of Mechanical and Industrial Engineering, Louisiana State University
Dr. Gilbert received his PhD from Vanderbilt University in 2016. His research is centered around the areas of robots with highly deformable bodies with applications to inspection and healthcare, mechanics-based modeling, and novel technologies for human health and wellness, including medical devices.
Dr. Gilbert received his PhD from Vanderbilt University in 2016. His research is centered around the areas of ...
